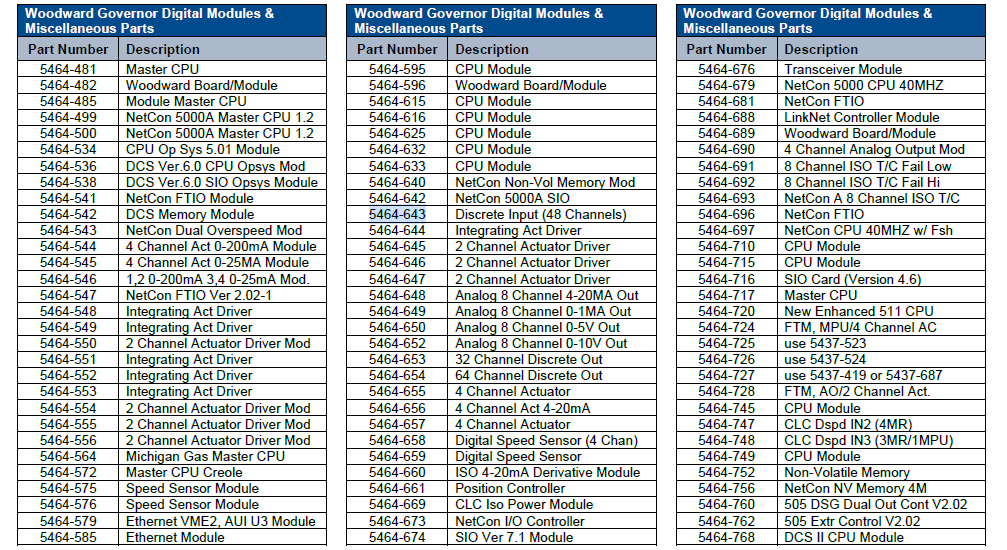
Woodward 5464-643 Discrete Input (48 ຊ່ອງ)

ລາຍລະອຽດ
| ຜະລິດ | Woodward |
| ຕົວແບບ | 5464-643 |
| ຂໍ້ມູນການສັ່ງຊື້ | 5464-643 |
| ລາຍການ | ການຄວບຄຸມດິຈິຕອນ MicroNet |
| ລາຍລະອຽດ | Woodward 5464-643 Discrete Input (48 ຊ່ອງ) |
| ຕົ້ນກໍາເນີດ | ສະຫະລັດ (ສະຫະລັດ) |
| ລະຫັດ HS | 85389091 |
| ຂະໜາດ | ຂະໜາດ 16*16*12ຊມ |
| ນ້ຳໜັກ | 0.8 ກິໂລ |
ລາຍລະອຽດ
ໂມດູນ I/O ອັດສະລິຍະມີຕົວຄວບຄຸມໄມໂຄຣຄວບຄຸມຢູ່ໃນກະດານຂອງຕົນເອງ. ໂມດູນທີ່ອະທິບາຍໄວ້ໃນບົດນີ້ແມ່ນໂມດູນ I/O ອັດສະລິຍະ. ໃນລະຫວ່າງການເລີ່ມຕົ້ນຂອງໂມດູນອັດສະລິຍະ, ໄມໂຄຄອນຄວບຄຸມຂອງໂມດູນຈະປ່ຽນ
ໄຟ LED ປິດຫຼັງຈາກການທົດສອບການເປີດດ້ວຍຕົນເອງໄດ້ຜ່ານໄປແລະ CPU ໄດ້ເລີ່ມໂມດູນ. ໄຟ LED ໄດ້ຖືກສະຫວ່າງເພື່ອຊີ້ໃຫ້ເຫັນຄວາມຜິດ I/O.
CPU ຍັງບອກໂມດູນນີ້ໃນກຸ່ມອັດຕາທີ່ແຕ່ລະຊ່ອງທາງທີ່ຈະດໍາເນີນການ, ເຊັ່ນດຽວກັນກັບຂໍ້ມູນພິເສດໃດໆ (ເຊັ່ນ: ປະເພດຂອງ thermocouple ໃນກໍລະນີຂອງໂມດູນ thermocouple). ໃນເວລາແລ່ນ, CPU ຫຼັງຈາກນັ້ນອອກອາກາດເປັນໄລຍະໆ "ຄີ" ໄປຫາບັດ I/O ທັງຫມົດ, ບອກພວກເຂົາວ່າກຸ່ມອັດຕາໃດຈະຖືກປັບປຸງໃນເວລານັ້ນ.
ໂດຍຜ່ານລະບົບການອອກອາກາດເບື້ອງຕົ້ນ / ທີ່ສໍາຄັນນີ້, ແຕ່ລະໂມດູນ I / O ຈັດການຕາຕະລາງອັດຕາກຸ່ມຂອງຕົນເອງດ້ວຍການແຊກແຊງ CPU ຫນ້ອຍ. ໂມດູນ I/O ອັດສະລິຍະເຫຼົ່ານີ້ຍັງມີການກວດຫາຄວາມຜິດທາງອິນເຕີເນັດໃນບັດ ແລະການປັບທຽບອັດຕະໂນມັດ/ການຊົດເຊີຍ. ແຕ່ລະຊ່ອງປ້ອນຂໍ້ມູນມີແຮງດັນຄວາມແມ່ນຍໍາຂອງຕົນເອງ
ອ້າງອິງ. ຫນຶ່ງຄັ້ງຕໍ່ນາທີ, ໃນຂະນະທີ່ບໍ່ໄດ້ອ່ານວັດສະດຸປ້ອນ, ໄມໂຄຄອນຄວບຄຸມເທິງເຮືອຈະອ່ານເອກະສານອ້າງອີງນີ້. ຈາກນັ້ນ microcontroller ໃຊ້ຂໍ້ມູນນີ້ທີ່ອ່ານຈາກການອ້າງອິງແຮງດັນສໍາລັບທັງການກວດສອບຄວາມຜິດແລະການຊົດເຊີຍອຸນຫະພູມອັດຕະໂນມັດ / ການປັບທຽບ.
ມີການກໍານົດຂອບເຂດຈໍາກັດສໍາລັບການອ່ານທີ່ຄາດໄວ້ໃນເວລາທີ່ microcontroller ເທິງກະດານອ່ານການອ້າງອີງແຕ່ລະແຮງດັນ. ຖ້າການອ່ານທີ່ໄດ້ຮັບແມ່ນຢູ່ນອກຂອບເຂດຈໍາກັດເຫຼົ່ານີ້, ລະບົບຈະກໍານົດວ່າຊ່ອງທາງການປ້ອນຂໍ້ມູນ, ເຄື່ອງແປງ A/D, ຫຼືການອ້າງອີງຄວາມແມ່ນຍໍາຂອງຊ່ອງແມ່ນເຮັດວຽກບໍ່ຖືກຕ້ອງ. ຖ້າສິ່ງນີ້ເກີດຂຶ້ນ,
microcontroller ທຸງຊ່ອງນັ້ນວ່າມີສະພາບຄວາມຜິດ. ຫຼັງຈາກນັ້ນ CPU ຈະດໍາເນີນການໃດກໍ່ຕາມທີ່ວິສະວະກອນຄໍາຮ້ອງສະຫມັກໄດ້ສະຫນອງໃຫ້ໃນໂຄງການຄໍາຮ້ອງສະຫມັກ.
ໂມດູນຜົນຜະລິດອັດສະລິຍະຈະກວດສອບແຮງດັນ ຫຼືກະແສໄຟຟ້າຂອງແຕ່ລະຊ່ອງ ແລະແຈ້ງເຕືອນລະບົບຖ້າກວດພົບຄວາມຜິດ. ແຕ່ລະໂມດູນ I/O ມີຟິວໃສ່ມັນ. ຟິວນີ້ແມ່ນເຫັນໄດ້ແລະສາມາດປ່ຽນແປງໄດ້ໂດຍຜ່ານ cutout ໃນຝາພາດສະຕິກຂອງໂມດູນ. ຖ້າຟິວຖືກເປົ່າ, ປ່ຽນມັນດ້ວຍຟິວທີ່ມີປະເພດ ແລະຂະໜາດດຽວກັນ.
ຮູບທີ 10-3 ແມ່ນແຜນຜັງບລັອກຂອງໂມດູນຕົວຄວບຄຸມຕົວກະຕຸ້ນສອງຊ່ອງ. ແຕ່ລະຊ່ອງຄວບຄຸມຕົວກະຕຸ້ນປະສົມປະສານຫຼືອັດຕາສ່ວນ, hydromechanical ຫຼື pneumatic. ແຕ່ລະຕົວກະຕຸ້ນອາດມີອຸປະກອນຕໍາແໜ່ງຕອບຮັບສູງສຸດສອງອັນ. ມີຫລາຍລຸ້ນທີ່ມີຢູ່, ແລະຕົວເລກສ່ວນຂອງໂມດູນຊີ້ໃຫ້ເຫັນເຖິງຄວາມສາມາດຂອງຜົນຜະລິດສູງສຸດຂອງໂມດູນ. ຕ້ອງໃຊ້ສາຍເຄເບີ້ນ MicroNet lowdensity discrete (ສີຂີ້ເຖົ່າ) ກັບໂມດູນນີ້. ຢ່າໃຊ້ສາຍອະນາລັອກ (ສີດໍາ).
ໂມດູນ Actuator Driver ນີ້ໄດ້ຮັບຂໍ້ມູນດິຈິຕອນຈາກ CPU ແລະສ້າງສີ່ສັນຍານຕົວກະຕຸ້ນ-driver ອັດຕາສ່ວນ. ສັນຍານເຫຼົ່ານີ້ແມ່ນອັດຕາສ່ວນແລະລະດັບສູງສຸດຂອງມັນແມ່ນ 0 ຫາ 25 mAdc ຫຼື 0 ຫາ 200 mAdc.
ຮູບທີ 10-5 ແມ່ນແຜນວາດບລັອກຂອງໂມດູນ Driver Actuator ສີ່ຊ່ອງ. ລະບົບຈະຂຽນຄ່າຜົນຜະລິດໄປຍັງໜ່ວຍຄວາມຈຳສອງພອດຜ່ານອິນເຕີເຟດ VME-bus. ໄມໂຄຄອນຄວບຄຸມຈະປັບຂະໜາດຄ່າໂດຍໃຊ້ຄ່າຄົງທີ່ການປັບຕົວທີ່ເກັບໄວ້ໃນ EEPROM, ແລະກຳນົດເວລາໃຫ້ຜົນອອກມາຕາມເວລາທີ່ເຫມາະສົມ. microcontroller ຕິດຕາມກວດກາແຮງດັນຜົນຜະລິດແລະປະຈຸບັນຂອງແຕ່ລະຊ່ອງແລະເຕືອນລະບົບຂອງຊ່ອງໃດແລະຄວາມຜິດພາດການໂຫຼດ. ລະບົບສາມາດປິດການໃຊ້ງານໄດເວີໃນປະຈຸບັນເປັນສ່ວນບຸກຄົນ. ຖ້າກວດພົບຄວາມຜິດທີ່ປ້ອງກັນບໍ່ໃຫ້ໂມດູນເຮັດວຽກ, ໂດຍ microcontroller ຫຼືລະບົບ, FAULT LED ຈະສະຫວ່າງ.